Med den kraftige utviklingen av den elektroniske industrien, endres posisjonsdeteksjonen av noen strukturelle komponenter sakte fra den opprinnelige kontaktmålingen til den ikke-kontaktmålingen t.o.m.Hallposisjonssensor og magnet. Hvordan kan vi velge en passende magnet i henhold til våre produkter og struktur? Her gjør vi noen enkle analyser.
Først må vi bestemme magnetmaterialet. For tiden er samarium koboltmagnet og neodymjernbor mye brukt i hallposisjonssensor. Hovedforskjellen mellom de to magnetene er at basert på samme volum er NdFeB-magneter sterkere enn samarium-koboltmagneter; den termiske ekskursjonen av samariumkobolt er mindre enn for Nd-Fe-B; oksidasjonsmotstanden til samariumkobolt er sterkere enn for Nd-Fe-B, men generelt er det et belegg på utsiden av magneten, som kan løse problemet med oksidasjon; samarium-koboltmagneten har bedre temperaturmotstand enn NdFeB-magnet, men temperaturmotstandsverdien for begge magnetmaterialene kan nå mer enn 200 ℃. Derfor, når vi velger type magnet, bør vi vurdere den i kombinasjon med kostnadsytelse, arbeidstemperatur og arbeidsmiljø. Generelt kan NdFeB brukes mer, hovedsakelig fordi det har de beste magnetfeltkarakteristikkene. Men når du arbeider i et bredt temperaturområde, anbefales det å velge samarium koboltmagnet på grunn av dens lille termiske drift.
I tillegg må vi bestemme noen grunnleggende parametere for magneten. I henhold til testposisjonsinformasjonen og bevegelsesretningen til objektet, bestemmer vi om magnetiseringsretningen til magneten er diametral eller aksial. I tillegg bestemmes det om det skal velges enfirkantet magneteller asylindermagneti henhold til installasjonsstrukturen. Noen ganger må vi selvfølgelig tilpasse formen på magneten i henhold til strukturen. Det er en annen kravfaktor om magnetfluks, som alltid har vært vår bekymring i magnetvalg. Faktisk må vi analysere det i følgende to aspekter:
1. Magnetfeltstyrken indusert av selve hallposisjonssensoren og det induserte magnetiske feltområdet i hver retning vil være tydelig merket i sensordataboken.
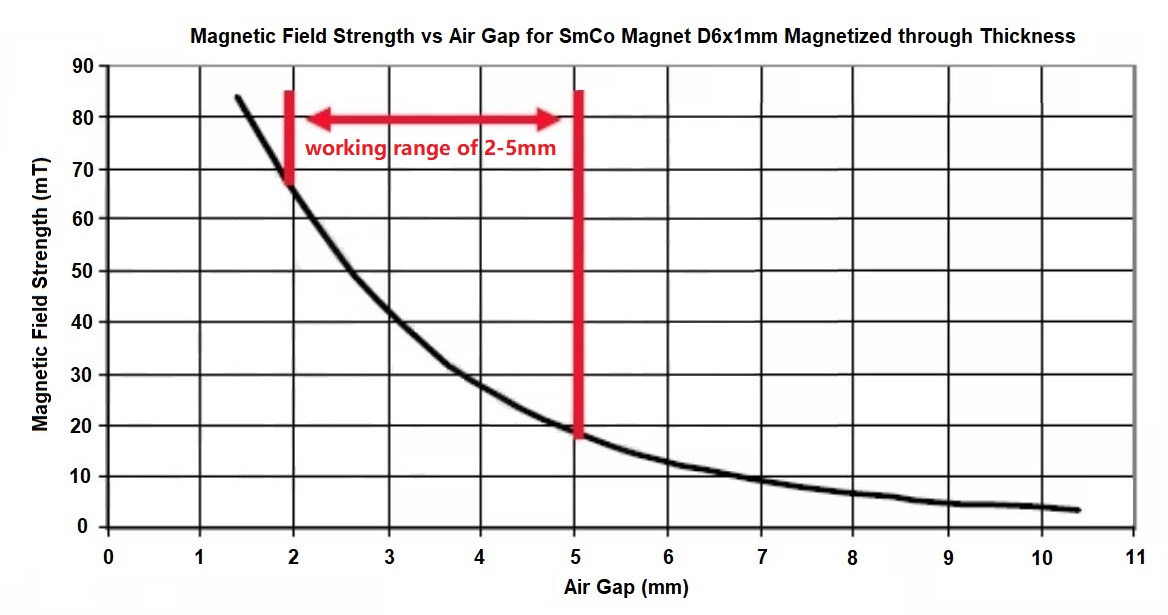
2. Avstanden mellom magneten og selve sensoren bestemmes generelt av produktstrukturen. I henhold til de to ovennevnte aspektene og magnetfeltendringskurven i figuren nedenfor som et eksempel, kan vi bestemme magnetfeltstyrken til den nødvendige magneten.
Til slutt må vi forstå at det ikke betyr at så lenge magnetfeltet faller på rekkeviddekravene til sensoren, kan magneten være så langt unna sensoren. Selv om selve sensoren har kalibreringsfunksjon, må vi forstå at når magneten er for langt fra sensoren, er fordelingen av selve magnetfeltet vanskelig å sikre linearitet eller nær linearitet. Dette betyr at med endringen av posisjon og den ikke-lineære fordelingen av selve magnetfeltet, vil sensormålingen bli kompleks og kalibreringen blir svært kompleks, slik at produktet ikke har reduserbarhet.
Ovennevnte er bare en enkel analyse av magnetvalg i Hall-sensorapplikasjoner. Vi håper det vil være nyttig for deg. Hvis du har andre spørsmål under utviklingsprosessen, vennligst kontakt oss,Ningbo Horizon Magnetics. Vi kan kommunisere videre og gi deg teknisk støtte.
Innleggstid: 12. august 2021